SolidWorks 到 URDF 导出器是一个 SolidWorks 插件,可以方便地将 SW 零件和装配体导出到 URDF 文件中。导出器将创建一个类似 ROS 的包,其中包含网格、纹理和机器人(urdf 文件)的目录。对于单个 SolidWorks 零件...
”URDF导出器 ROS机器人 SolidWorks装配体“ 的搜索结果
学习记录
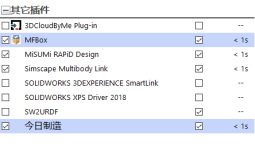
模型文件的导出转换需要用到ROS官网中的sw_urdf_exporter插件,打开网站“http://wiki.ros.org/sw_urdf_exporter”,点击“Download Installer”进入版本选择下载安装最新版本下的“sw2urdfSetup.exe”,下载完成后...

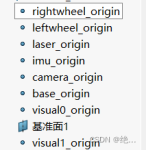
先参考我上一篇博客需要先自己建立文件夹结构ROS创建机器人的urd模型、rviz可视化_杜嗨皮的博客-程序员宅基地先说一下我的文件夹结构这样你就容易理解我后边的步骤。
**目标**:把Solidworks的机器人模型导入Webots,保存运动副关系,导入后直接控制。 **工具链**:使用SW2URDF插件导出URDF文件,然后使用python - urdf2webots模组,生成proto文件导入Webots。 **提示**:工具链不...
针对不同版本solidworks(2018 2019 2020 2021)的插件,用于solidworks装配文件转urdf文件。 SolidWorks 到 URDF 导出器 SolidWorks 到 URDF 导出器是一个 SolidWorks 插件,可以方便地将 SW 零件和装配体导出到 URDF...
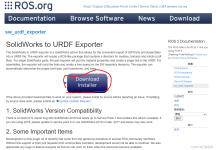
sw_urdf_exporter ...SolidWorks到URDF导出器是一个SolidWorks加载项,允许将SW部件和组件方便地导出到URDF文件中。 导出器将创建一个类似ROS的包,其中包含网格,纹理和机器人(urdf文件)的目录。 对



URDF文件,是ROS系统中的,一种机器人的描述文件。全称:Unified Robot Description Format 它以HTML的形式定义一个机器人。包含的内容有:连杆、关节名称...ROS目前提供了solidworks转URDF的插件,叫做sw_urdf_expor

欢迎加入ROS爱好者交流群,进群请私信天之博特TIANBOT

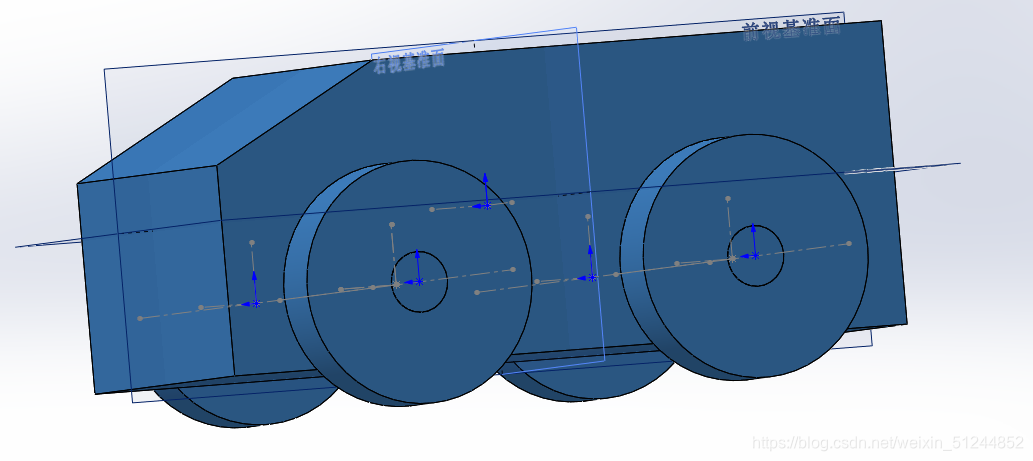
前面刚刚在Solidworks软件中搭建了履带式机器人,为了在ROS下进行履带式机器人的仿真实验,接下来先将其转为URDF模型,并在rviz中显示。

http://wiki.ros.org/sw_urdf_exporter sw_urdf_exporter SolidWorks to URDF Exporter So...
尝试过写urdf和xacro,没有试过使用SolidWorks导出模型。 使用SolidWorks 2016 使用SolidWorks to URDF Exporter工具:link SolidWorks_2016帮助文档:link 使用SolidWorks画出各个零件,再在新建装配图将各个零件...


ROS目前提供了SolidWorks转URDF的插件,叫做sw_urdf_exporter,从http://wiki.ros.org/sw_urdf_exporter下载sw2urdfSetup.exe文件,下载后点击安装,安装完成后就能在solidworks中导出URDF模型了。 二、创建solid...


针对实验室自制的全方位移动机器人 SolidWorks 模型转 URDF 并在 Rviz 中仿真测试各个关节的运动
solidworks转urdf插件导出参数详解
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地